Lägg till som läxa
Lägg till som stjärnmärkt
Frågor hjälpmarkerade!
Alla markeringar försvinner.
KURSER /
Fysik 2
/ Harmonisk svängningsrörelse
Grundläggande begrepp vid harmonisk svängningsrörelse

I den här lektionen ska vi titta på något som kallas för svängningsrörelse. Svängningar, eller oscillationer som det också kallas, är inom fysiken en periodisk rörelse som sker kring ett jämviktsläge och mellan två ytterlägen. Sådana rörelser är mycket vanliga i naturen och vardagen. T ex en gunga på en lekplats, armarna när du går, hoppande på en studsmatta och pendelklockor. Till och med atomer vibrerar periodiskt i molekyler. Detta gör att kunskap om hur svängningsrörelser fungerar är viktiga i fysiken. Vi ska särskilt titta på en idealiserad svängningsrörelse som kallas harmonisk svängningsrörelse.
Harmonisk svängningsrörelse
Det finns olika sätt att definiera harmonisk svängningsrörelse, men här räcker det att utgå från att en harmonisk svängningsrörelse är en jämn periodisk rörelse, som sker kring ett jämviktsläge och mellan två ytterlägen. Vi bortser även från friktion, och det innebär att rörelsen inte dämpas utan fortsätter svänga på samma sätt hela tiden. Harmonisk svängningsrörelse kallas ”simple harmonic motion” på engelska och förkortas därför ibland SHM.
Ett första enkelt exempel skulle kunna vara en boll som läggs på kanten i en friktionsfri skål och släpps.
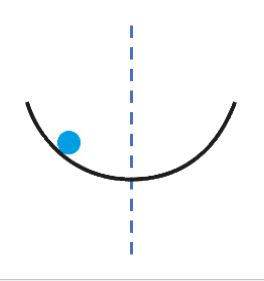
Bollen svänger mellan två ytterlägen och svängningen sker kring ett jämviktsläge i botten på skålen.
Om vi analyserar situationen ur ett energiperspektiv så har bollen i ytterlägena en viss potentiell energi, men ingen kinetisk energi eftersom den ju är stilla i vändlägena.
Den potentiella energin omvandlas under rörelsen mot skålens botten till rörelseenergi och precis i botten, dvs vid jämviktsläget, har all potentiell energi omvandlats till kinetisk energi. Bollen har därför sin högsta fart här.
Bollen passerar jämviktsläget och farten minskar medan bollens potentiella energi ökar igen, fast nu längs med skålens andra sida. Rörelseenergin omvandlas till potentiell energi.
Bollen gör sedan samma rörelse som tidigare men riktad åt andra hållet.
Eftersom vi bortser från friktion kommer rörelsen att fortsätta på samma sätt.
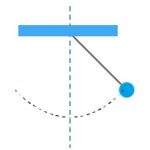
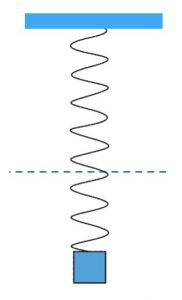
Andra exempel på svängningssystem är t ex en massa på ett snöre som fås att svänga fram och tillbaka, en så kallad pendel. Detta system har uppenbarligen stora likheter med t ex en gunga. Ytterligare ett exempel, och det system vi ska börja studera, är en massa som hänger i en vertikal fjäder.
I videon går vi igenom ett antal begrepp och hur de hänger samman med harmonisk svängningsrörelse. Dessa begrepp är viktiga att förstå för att hänga med i resten av kapitlet. Här följer en kort sammanställning av dessa begrepp.
Periodtid
Tiden det tar utföra en ”hel rörelse” eller en hel svängning, dvs att objektet går från ett startläge, utför svängningen, och sedan kommer tillbaka till startläget igen, kallas för svängningstid, periodtid eller bara period och betecknas $T$T .
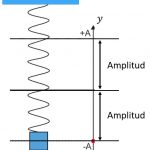
Amplitud
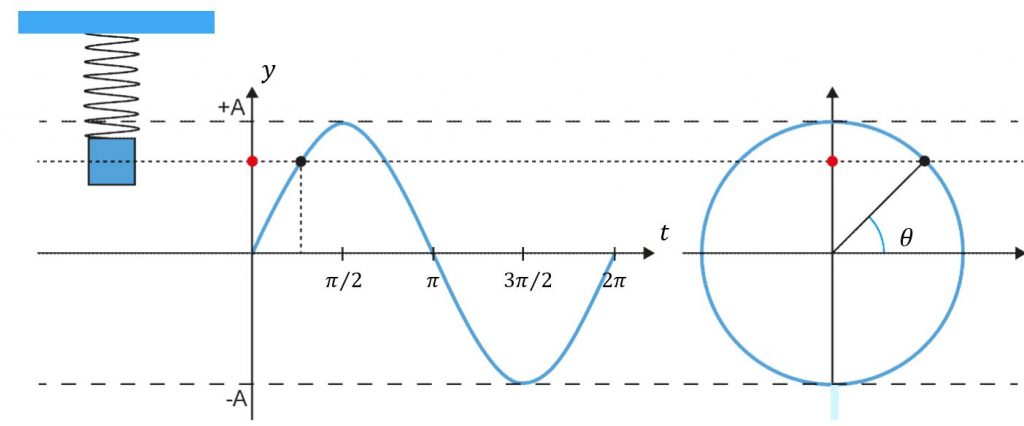
Avståndet mellan jämviktsläget och ett ytterläge kallas amplitud och betecknas $A$A . Det övre vändläget har $y$y-koordinaten +A, och det undre vändläget har $y$y-koordinaten –A. Rörelsen pendlar alltså mellan dessa två lägen. Amplituden är ett positivt värde med SI-enheten meter.
Frekvens
Frekvens definieras som antal svängningar per sekund och betecknas med $f$ƒ . SI-enheten är $\frac{1}{s}$1s och denna enhet har fått namnet $1$1 Hz (Hertz).
Vinkelfrekvens eller vinkelhastighet
En harmonisk svängningsrörelse kan kopplas ihop med cirkelrörelse, och detta leder till begreppet vinkelfrekvens eller vinkelhastighet. Detta är hastigheten som vinkeln ökar med under svängningsrörelse, och betecknas med den grekiska bokstaven $\text{ω}$ω . SI-enhet är rad/s.
Elongation
Massans position på $y$y-axeln kallas elongation och betecknas med $y$y. Elongationen kan också sägas vara massans avvikelse från jämviktsläget. En harmonisk svängningsrörelse kan beskrivas med en sinusfunktion, och detta ger att elongationen kan uttryckas som:
$y=A\sin\theta$y=Asinθ
Vinkelhastighet definieras som $ω=$ω= $\frac{\theta}{t}$θt . Vinkelförändringen för ett helt varv är $2\pi$2π rad, och tiden för ett helt varv är $T$T . Det innebär att vi även kan ange vinkelhastigheten som $ω=$ω= $\frac{2\pi}{T}$2πT . Sedan tidigare vet vi att $T=$T= $\frac{1}{f}$1ƒ .
Genom att använda dessa samband kan vi skriva:
$\theta=ωt$θ=ωt $\text{⇒}$⇒ $y=A\sin\left(ωt\right)$y=Asin(ωt)
eller
$ω=$ω= $\frac{2\pi}{T}$2πT $=2\pi f$=2πƒ $\text{⇒}$⇒ $y=A\sin\left(2\pi ft\right)$y=Asin(2πƒ t)
Kommentarer
██████████████████████████
████████████████████████████████████████████████████
e-uppgifter (4)
-
1. Premium
En massa på en fjäder utför en harmonisk svängningsrörelse. Avståndet mellan ytterlägena är $22$22 cm. Vad är rörelsens amplitud? Svara i cm.
Svar:π²Ditt svar:Rätt svar:(Korrekta varianter)Ger rätt svar {[{correctAnswer}]}Bedömningsanvisningar/Manuell rättningRätta själv Klicka i rutorna och bedöm ditt svar.-
-
Rättad
-
+1
-
Rättad
Rättar...2. Premium
Lisa är hemma hos sin farmor och farfar. De har ett gammalt pendelur. Lisa mäter tiden det tar pendeln att göra $60$60 svängningar till $2,0$2,0 minuter. Vad är pendelns frekvens?
 Svar:π²Ditt svar:Rätt svar:(Korrekta varianter)
Svar:π²Ditt svar:Rätt svar:(Korrekta varianter)Ger rätt svar {[{correctAnswer}]}Bedömningsanvisningar/Manuell rättningRätta själv Klicka i rutorna och bedöm ditt svar.-
-
Rättad
-
+1
-
Rättad
Rättar...3. Premium
Du ser en flicka gå över en hängbro. När hon kommer till mitten på hängbron börjar hon hoppa i jämn takt och hela bron utför en harmonisk svängningsrörelse. Du räknar att bron gör $10$10 hela svängningar på $6,0$6,0 sekunder. Beräkna periodtiden.
Svar:π²Ditt svar:Rätt svar:(Korrekta varianter)Ger rätt svar {[{correctAnswer}]}Bedömningsanvisningar/Manuell rättningRätta själv Klicka i rutorna och bedöm ditt svar.-
-
Rättad
-
+1
-
Rättad
Rättar...Din skolas prenumeration har gått ut!Din skolas prenumeration har gått ut!4. Premium
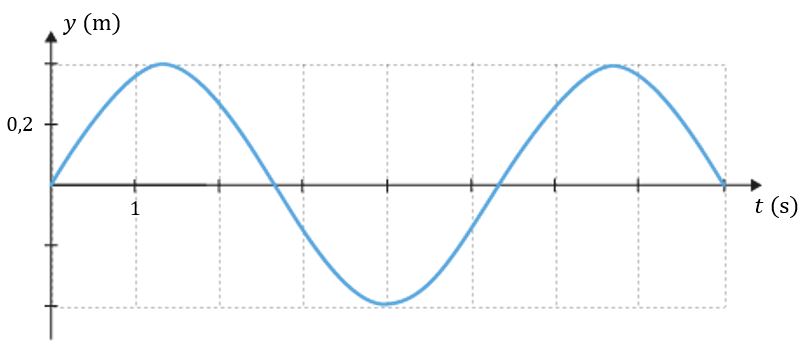
En harmonisk svängningsrörelse beskrivs i figuren nedan. Vad är amplituden, frekvensen och perioden?
 Bedömningsanvisningar/Manuell rättning
Bedömningsanvisningar/Manuell rättningRätta själv Klicka i rutorna och bedöm ditt svar.-
-
Rättad
-
+1
-
Rättad
Rättar...c-uppgifter (1)
-
5. Premium
En harmonisk svängningsrörelse beskrivs av funktionen $y=0,003\cdot\sin\left(20\pi t\right)$y=0,003·sin(20πt) . Bestäm:
a) amplituden
b) vinkelfrekvensen
c) frekvensen
d) perioden
e) elongationen vid tiden $10,0$10,0 ms
Bedömningsanvisningar/Manuell rättningRätta själv Klicka i rutorna och bedöm ditt svar.-
-
Rättad
-
+1
-
Rättad
Rättar...
-
Det finns inga befintliga prov.
-
{[{ test.title }]}
●
Lektion
Kategori
ID
Test i 7 dagar för 9 kr.
Det finns många olika varianter av Lorem Ipsum, men majoriteten av dessa har ändrats på någotvis. Antingen med inslag av humor, eller med inlägg av ord som knappast ser trovärdiga ut.

Logga in
viaAll svar raderas. Detta går inte att ångra detta.
Endast Premium-användare kan kommentera.